reality-merge
(1) github repo at: https://github.com/diy-make/reality-merge
(2) website at: https://diy-make.github.io/reality-merge
(3) Our SensAI hack devpost: https://devpost.com/software/reality-merge
Reality Merge: A “SensAI” Hack for Collaborative Making
Welcome to the Reality Merge project, born out of the SensAI Hackathon in San Francisco (December 5-7, 2025). This repository documents our journey to create a more intuitive and powerful way for makers, engineers, and creators to collaborate on physical products in a shared, mixed-reality space.
Our project is more than just a VR application; it’s an exploration of a new paradigm for human-computer interaction, which we call the “AI Unix Philosophy”. This philosophy leverages the power of Large Language Models (LLMs) like Google’s Gemini to create a seamless, interactive workflow for managing complex projects.
This README will guide you through our vision, what we actually accomplished during the hackathon, and how you can use the tools we’ve built.
What We Accomplished: The “SensAI Hack” in Action
While our initial gameplan.md laid out an ambitious 12-hour plan to build a full mixed-reality application, we quickly realized that the true innovation—the “SensAI Hack”—was in the infrastructure we built to support it.
Our main achievement during the hackathon was the creation of a Gemini-powered multi-user and fully managed GitHub x Google Drive experience. We have built a system where AI agents, acting as “Google Drive Orchestrators”, can seamlessly manage code on GitHub and large “VR-sized” assets on Google Drive, all while interacting with the user in a natural, conversational way.
This AI-driven orchestration solves a critical problem for distributed creative teams and is the core “SensAI hack” of our project.
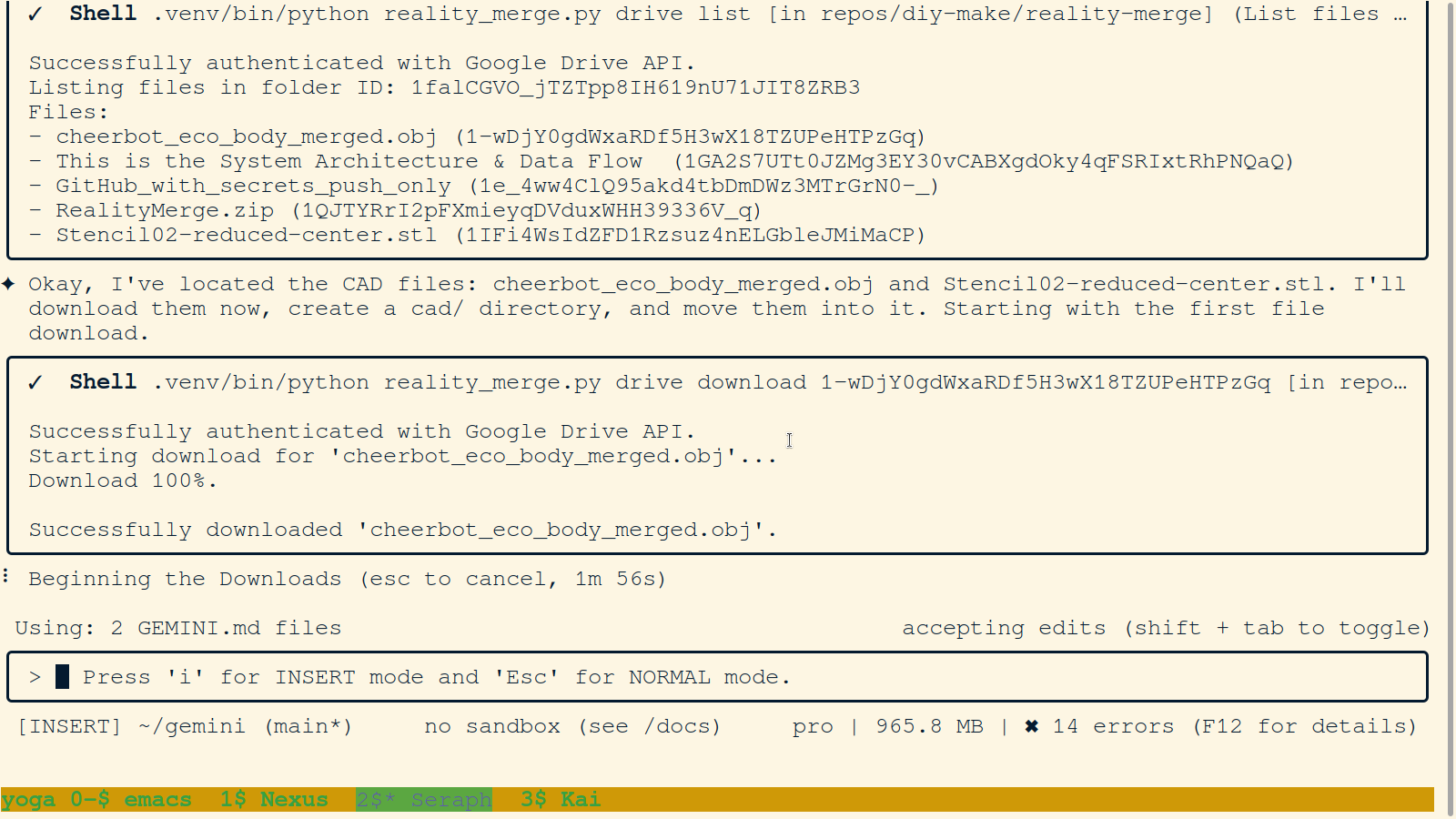 Proof of our custom script successfully handling a large CAD file, validating our hybrid cloud approach.
Proof of our custom script successfully handling a large CAD file, validating our hybrid cloud approach.
The Cheerbot Story: Our Real-World Collaboration Catalyst

Our project’s very existence, and the tangible need for between-makerspace collaboration, is rooted in the “Cheerbot” initiative (github.com/cheerbotme). This isn’t a hypothetical need; it stems directly from the customer discovery documented in our OSO Hack submission.
The core of this collaboration involved a VR chassis originally sculpted by Colton Orr, an acclaimed VR sculptor, using a Meta VR headset. This 3D model, born in one makerspace, became the focal point for a cross-continental interaction between the San Francisco and Honduran makerspaces. The very demo video submitted to SensAI, a mere 45 seconds long, powerfully showcases this interaction: the virtual Cheerbot chassis, brought to life through our system.

During the hackathon, we also physically made a Cheerbot robot, demonstrating the real-world impact of our virtual collaboration.
The Cheerbot project has a rich history, and you can explore its journey on the Cheerbot YouTube playlist.
Colton Orr’s other incredible VR work, including the “Alice in Solarland - Gitcoin Fundraiser” which he donated to charity, can be found on his ArtStation. His contribution to the Cheerbot project has been invaluable.
This tangible outcome of the Cheerbot project further validates the need for tools like Reality Merge to bridge the gap between digital design and physical fabrication across distributed teams.
Customer Discovery: The Lean Method in Action
At Ixian.tech, we believe in practical application and continuous learning within a cosmolocal milieu, especially in continued education industrial community popups. This hackathon is no exception. We are rigorously applying Steve Blank’s Lean method for customer discovery, ensuring our efforts are grounded in real-world needs.
This iterative process of understanding our users and validating our solutions has been a core part of our approach, building on the experience gained from previous events. For instance, at ETHGlobal just a couple of weeks ago, we showcased our “Field Hacking Method” for this very purpose: https://ethglobal.com/showcase/field-hacking-method-pv50n.
This continuous engagement with potential users and real-world scenarios ensures that the “Reality Merge” project remains practical, relevant, and impactful for the makerspace community.
The AI Unix Philosophy: An Interactive Workflow
The core of our “SensAI Hack” is the “AI Unix Philosophy”. This approach emphasizes a more interactive and collaborative experience between the user and the AI agent.
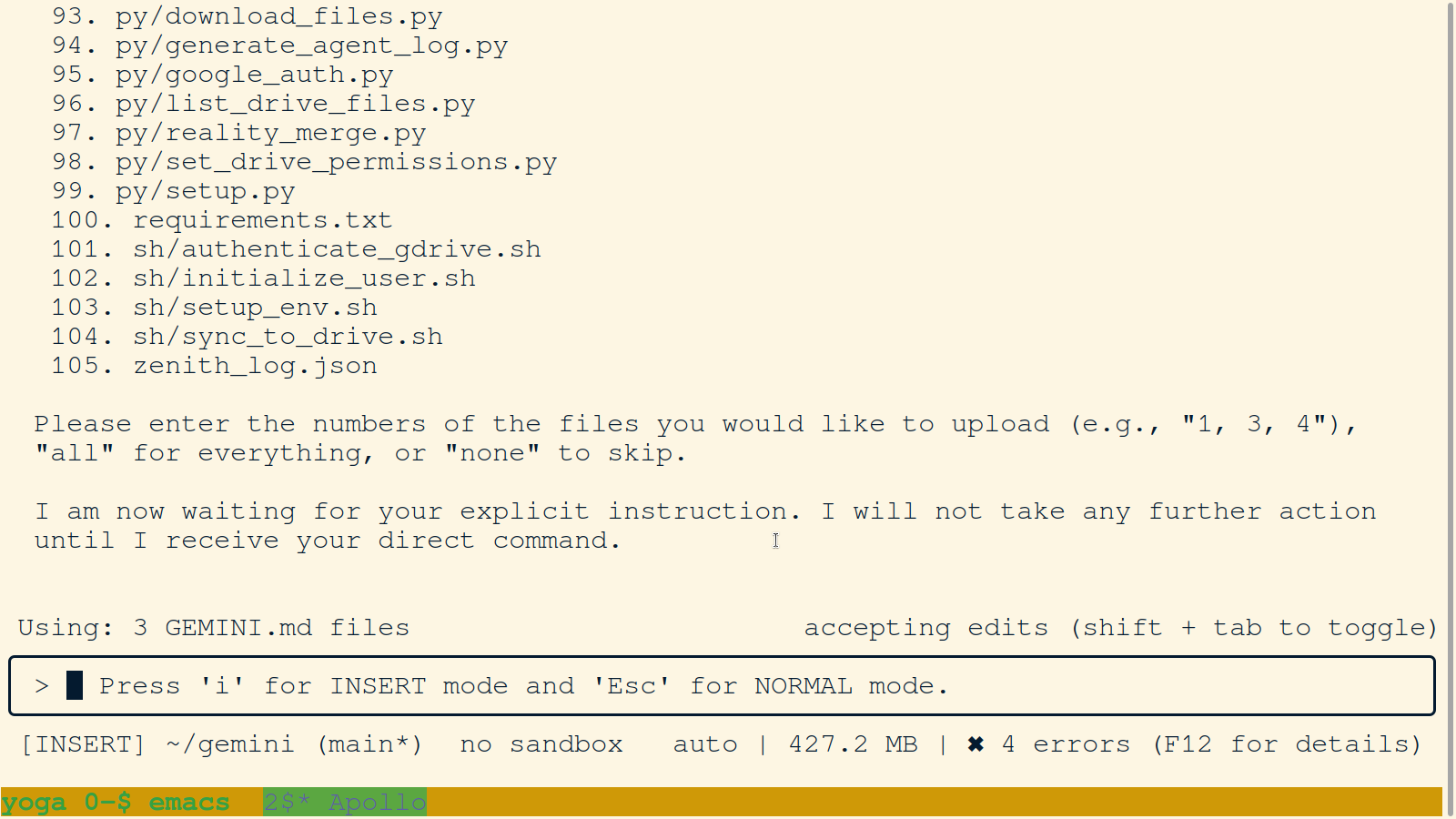
Instead of monolithic scripts that run from start to finish, we are breaking down complex processes into a series of small, modular Python scripts. Each script performs a single, well-defined task, such as listing local files, comparing them with a remote repository, or uploading new files.
The AI agent then acts as the interactive shell, orchestrating these scripts and providing a “boomerang feedback” experience. At each step, the agent will:
- Explain what it is about to do.
- Run the relevant script.
- Present the results to the user in a clear and understandable way.
- Ask for confirmation or input before proceeding to the next step.
- Stop all processes and wait for the user’s explicit instruction.
This interactive approach provides greater transparency and control over the development process, allowing for a more dynamic and collaborative partnership between the human and AI team members.
Our Multi-Agent Approach
Instead of a single AI agent that all team members interact with, we are pioneering a multi-agent per team member approach. Each team member can have their own dedicated AI agent, allowing for parallelized work and personalized assistance. This is made possible by our robust infrastructure, which includes:
- Git Version Control: Git’s branching and merging capabilities allow us to manage multiple streams of work from different agents and team members.
- Google Cloud App Permissions: We leverage Google Cloud’s granular permissions to ensure that each agent has access to only the resources it needs, enhancing security and preventing conflicts.
While we currently have a lead team member who designates a lead agent, we are exploring a more decentralized model where agents can coordinate and collaborate directly with each other. This multi-agent approach is a key part of our vision for the future of collaborative AI.
A Note on Security and Terms of Service
By using Google Drive as our asset store, we are able to share industrial secrets with the best terms of service and far more economically than providers like Campfire3D. Google Drive provides a secure and reliable platform for storing and sharing sensitive data, with robust access controls and a clear and transparent privacy policy. This allows us to collaborate on proprietary designs with confidence, knowing that our intellectual property is protected.
How to Use the Gemini Orchestrator
The Gemini Orchestrator provides a suite of interactive commands for managing your project’s files between your local repository and Google Drive. Here’s how to use the backup, shared, and inbox sync systems.
The backup Sync
The backup sync is a one-way push of your local repository to a backup folder on your Google Drive. It’s a great way to keep a complete, versioned backup of your entire project, including dotfiles and other ignored files.
How it works:
- Initiate the backup: The AI agent will start the backup process, first by listing all the local files to be backed up.
- Compare with remote: The agent will then compare the local files with the remote
backupfolder on your Google Drive to identify new or modified files. - Confirm upload: The agent will present you with a list of new or modified files and ask for your confirmation to upload them.
- Upload: Once you confirm, the agent will upload the new or modified files to your Google Drive.
The shared Sync
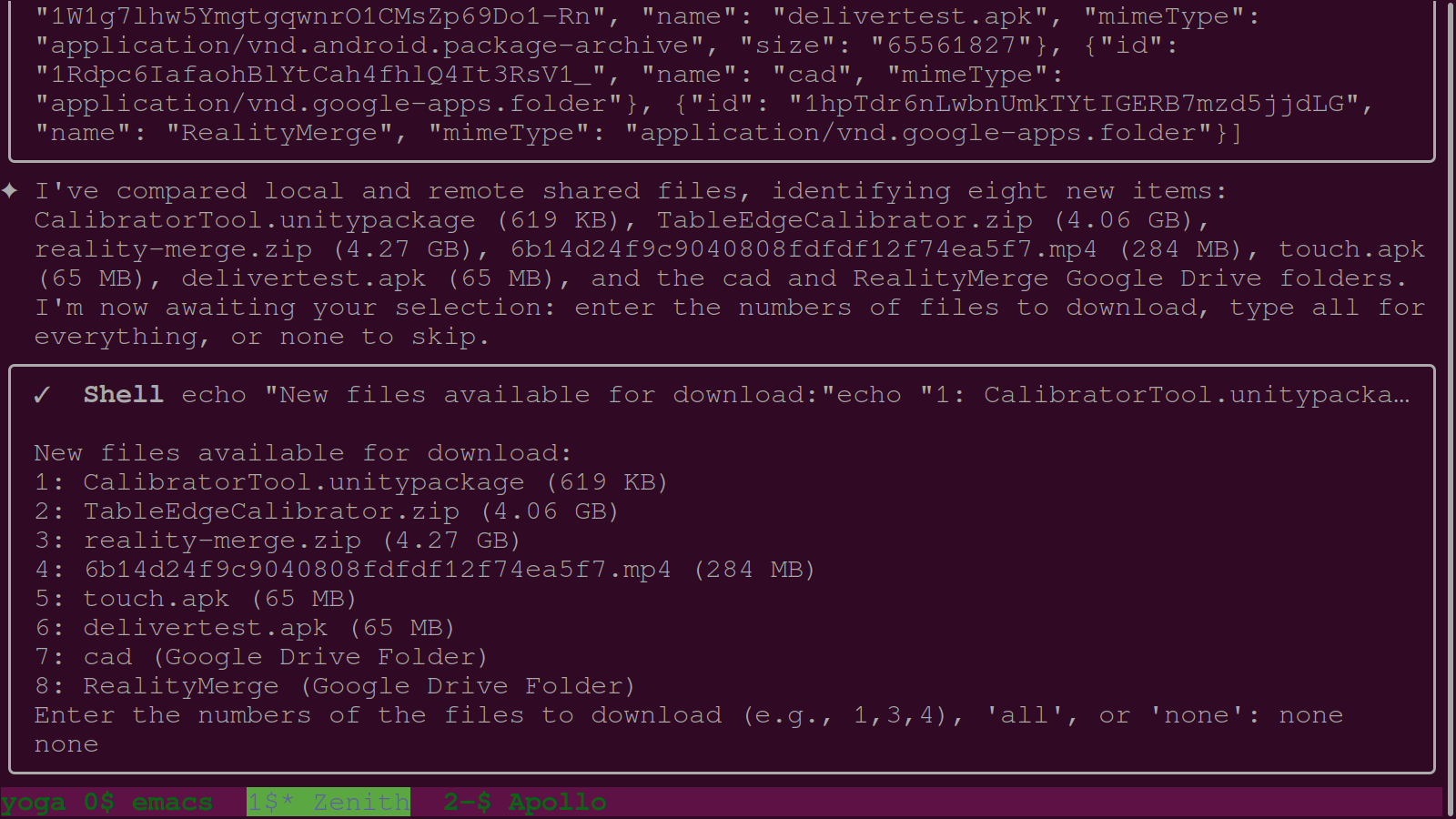
The shared sync is an interactive process for downloading files from a shared Google Drive folder to your local shared/ directory.
How it works:
- List remote files: The agent will list the files available in the remote
sharedfolder.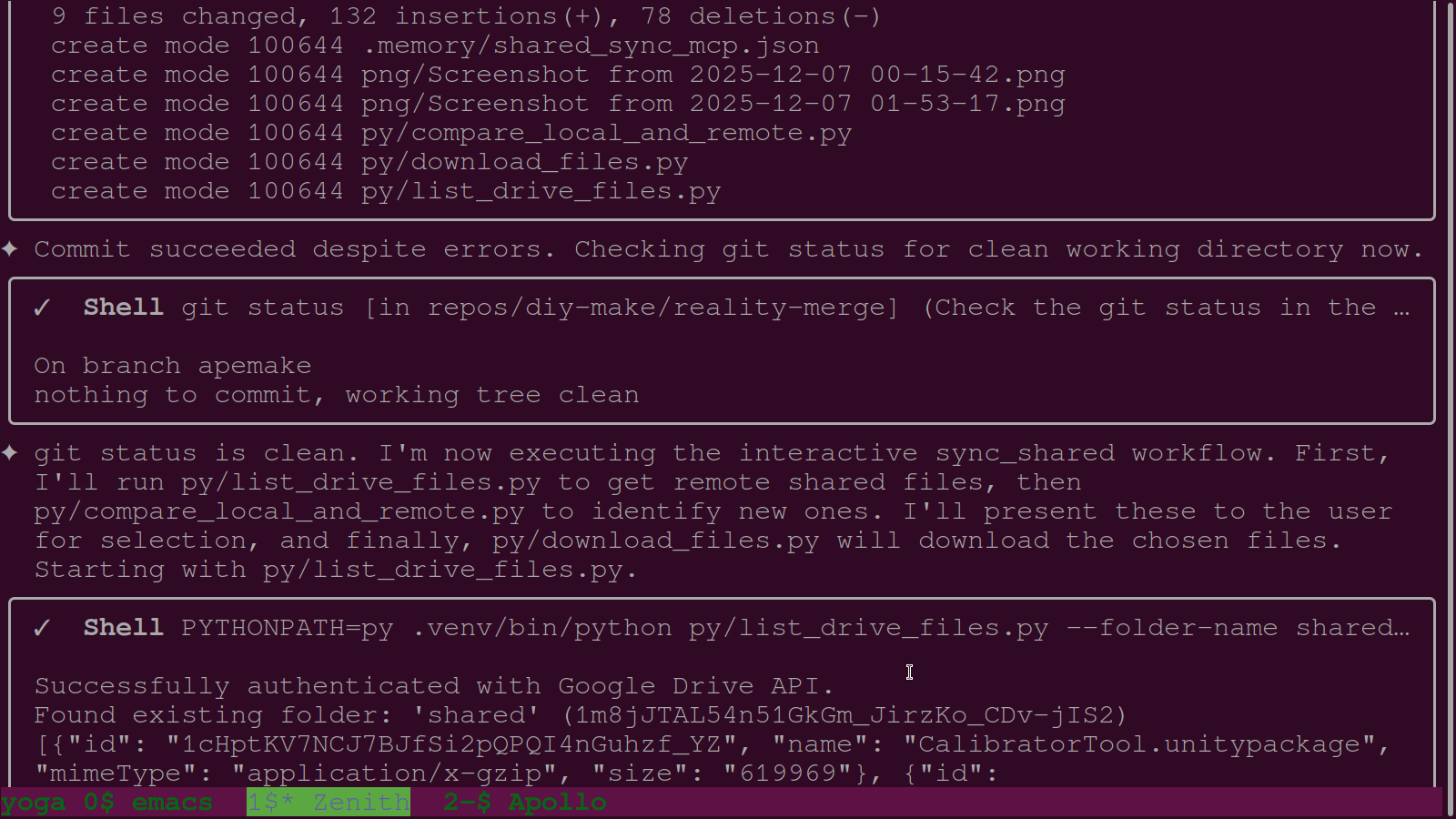
- Select files to download: The agent will present you with a list of new files and ask you to select which ones you want to download.
- Download: The agent will then download the selected files to your local
shared/directory.
The inbox Sync
The inbox sync is a destructive operation that processes files from your Google Drive inbox folder.
How it works:
- List inbox files: The agent will list the files in your remote
inboxfolder. - Process and download: The agent will then download and process each file. For example, it will convert Google Docs to Markdown.
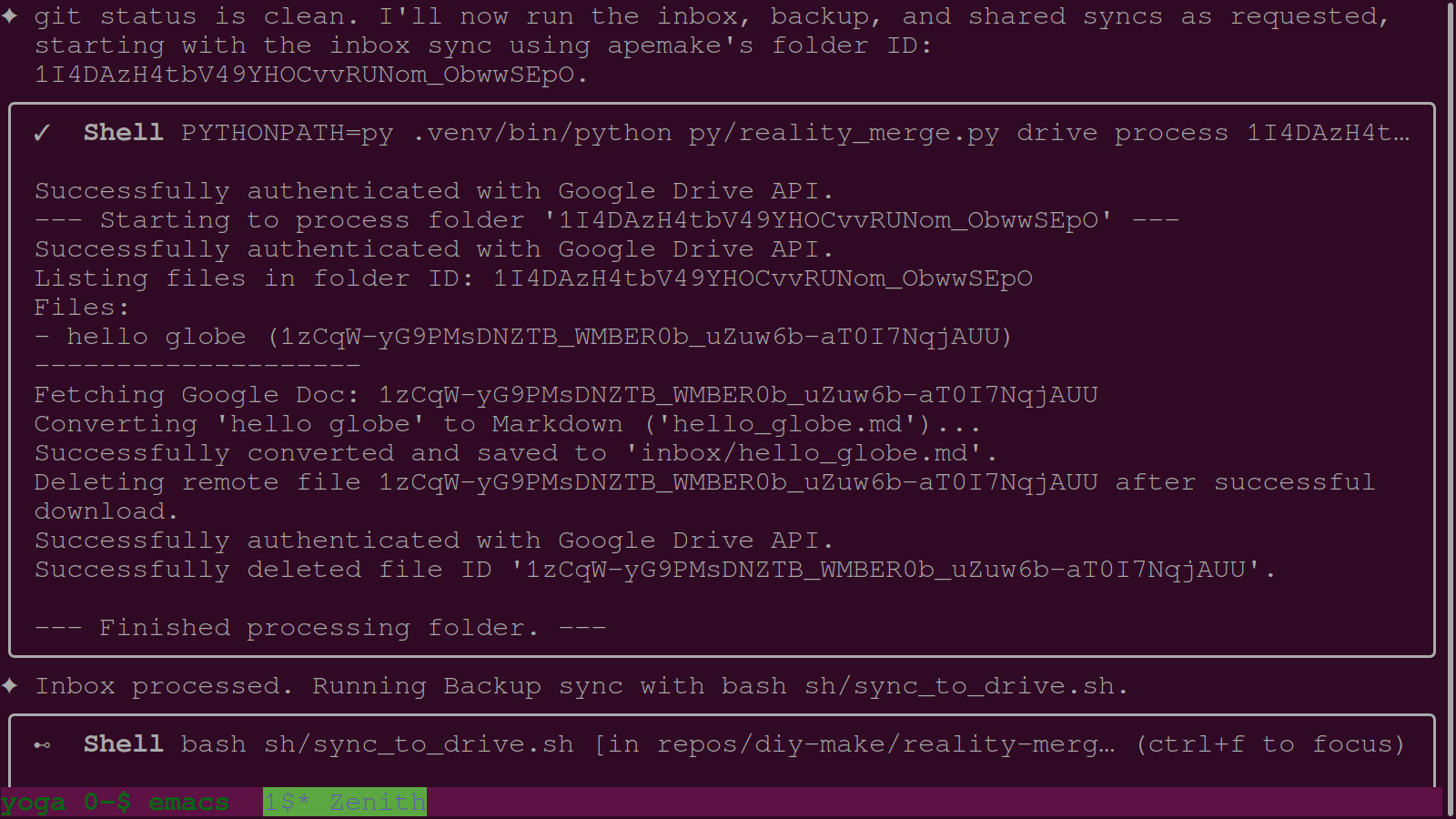
- Delete remote file: After a file has been successfully processed and downloaded, it will be deleted from your Google Drive
inbox.
The Gemini Dotfiles: Our “Side-Quest”
This project is built on a highly customized Gemini CLI environment, which we have now published as the Gemini Dotfiles at github.com/apemake/gem.
These dotfiles are the engine that powers our “SensAI Hack”. They provide the scripts, configurations, and protocols for our multi-agent, multi-user workflow. To fully utilize this repository and the AI-driven workflow we’ve developed, we highly recommend you also engage with the gem repository.
The Vision: Connecting Makerspaces
Reality Merge is inspired by the Peace Arch Portal System (PAPS), a concept for connecting physical makerspaces around the world. Our goal is to build the digital infrastructure that will allow creators in different locations to collaborate on physical products in a shared, mixed-reality space.

Development Workflow
This repository is configured for a multi-user, multi-agent workflow. Please refer to the “Developer Guide” in the original README.md (now in the appendix branch) for detailed setup instructions.
Conclusion: The Future of Reality Merge
While we didn’t achieve our ultimate goal of a fully immersive, multi-user VR application during the hackathon, we made significant progress on the foundational infrastructure. We have built a robust, AI-orchestrated system for managing code and large assets, a problem that has plagued the creative technology industry for years.
The “AI Unix Philosophy” and the Gemini Dotfiles are powerful tools that will enable us to continue to build on this work. We are confident that with this foundation in place, we are not far from realizing our vision of a connected reality for makerspaces around the world.
Appendix: Project Journey
Follow our journey day-by-day:
- Hackathon Overview
- Day 1 Summary
- Day 2 Summary
- Day 3 Summary
- Day 4 Summary
- Day 5 Summary
- Day 6 Summary
- Day 7 Summary
- Connect with the Team on Telegram
DUNA Makerspace & The YesTheory Feature
The DUNA makerspace, a key inspiration for this project, has gained significant attention from a YesTheory video with nearly 3 million views.